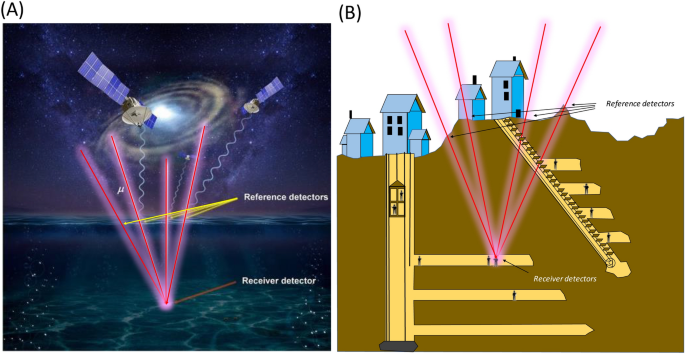
While satellite-based global navigation systems have become essential tools in our daily lives, their effectiveness is often hampered by the fact that the signals cannot be accessed in underground, indoor, or underwater environments. Recently, a novel navigation system has been invented to address this issue by utilizing the characteristics of the ubiquitous and highly penetrative cosmic-ray muons. This technique, muometric navigation, does not require active signal generation and enables positioning in the aforementioned environments within a reference coordinate defined by the three-dimensional positions of multiple detectors. In its first phase of development, these reference detectors had to be connected to the receivers via a wired configuration to guarantee precise time synchronization. This work describes more versatile, wireless muometric navigation system (MuWNS), which was designed in conjunction with a cost-effective, crystal-oscillator-based grandmaster clock and a performance evaluation is reported for shallow underground/indoor, deep underground and undersea environments. It was confirmed that MuWNS offers a navigation quality almost equivalent to aboveground GPS-based handheld navigation by determining the distance between the reference frame and the receivers within a precision range between 1 and 10 m.
While satellite-based global navigation systems have become essential tools in our daily lives, their effectiveness is often hampered by the fact that the signals cannot be accessed in underground, indoor, or underwater environments. Recently, a novel navigation system has been invented to address this issue by utilizing the characteristics of the ubiquitous and highly penetrative cosmic-ray muons.
How can you have “reference” detectors if they are not talking to the differential as providing the accuracy. or maybe it can be used to tell you where you were when you come back to the surface and compare notes, but I dont see how it can see where you are now? However, mapping the seabed with a UAV if it can produce a this is what a saw, is an interesting project.

How can you have “reference” detectors if they are not talking to the differential as providing the accuracy. or maybe it can be used to tell you where you were when you come back to the surface and compare notes, but I dont see how it can see where you are now? However, mapping the seabed with a UAV if it can produce a this is what a saw, is an interesting project.